Geneva Mechanism
A Geneva Mechanism (otherwise known as Maltese Cross) is used to turn continuous rotary motion to intermittent motion. It looks like this:
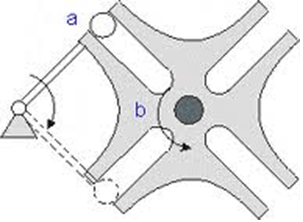
Member A rotates continuously, while B rotates 90 degrees at a time.
We’d like to compute the maximum torque required, assuming b has moent of inertia I.
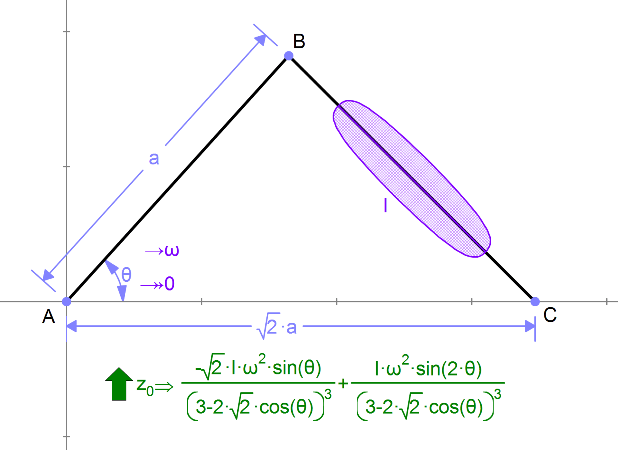
Setting I and ω to 1, we can graph this:
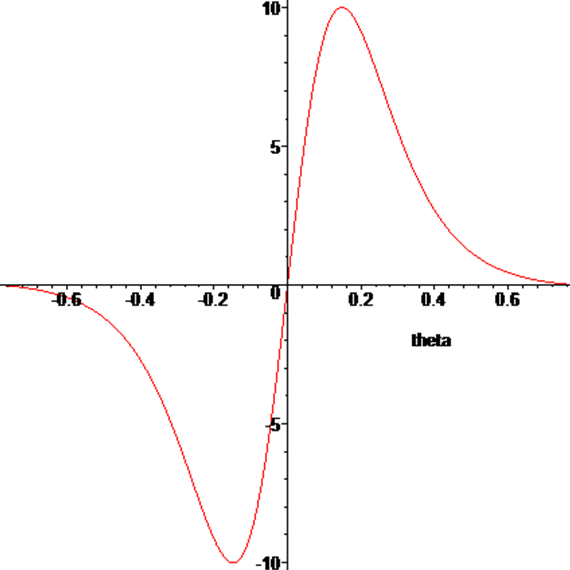
To find the maximum’s location, we can differentiate:
>simplify(diff(u,theta));

Solving (numerically) for θ gives:
>solve(du=0,theta);

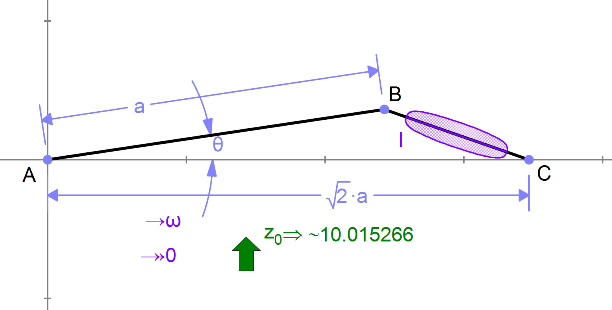
We can set the numeric value of θ in the variable panel, and look at the numeric reaction torque to get our maximal value (or we could have read off the graph above).
Explore More Examples
Geometric Modeling Examples |
Kinematics Examples |
Statics Examples |
Inverse Dynamics Examples |
Dynamics Examples |